热门关键词:示例页面

qq空间刷说说_快手免费涨1000粉丝软件_欢迎来到彩虹论坛
自助下单地址(拼多多砍价,ks/qq/dy赞等业务):点我进入
1、表面粗糙度
表面粗糙度是评价机械零件表面微观形貌的几何量参数。 零件的表面粗糙度影响机构的配合质量、运动性能和使用寿命。
国家标准规定表面粗糙度的评价基准为轮廓中心线; 现代表面粗糙度测量仪器,常采用最小二乘法建立轮廓中心线。 表面微观轮廓上各点到所建立的中心线的距离称为:轮廓偏移。 表面粗糙度测量仪的任务是采集采样长度l内表面轮廓各点的坐标xi、yi,并建立轮廓中心线,根据下列参数定量评价表面粗糙度。
1)参数Ra
Ra称为“轮廓算术平均偏差”,它实际取的是:在采样长度l内,所有轮廓偏差距离的绝对值的算术平均数(图1),即下式:
2)参数RZ
Rz称为显微粗糙度十点高度,定义为:在取样长度l内,五个最大轮廓峰高yPi的平均值与五个最大轮廓谷深yVi的平均值之和(图2),即下式:
3)参数Ry
Ry 称为轮廓的最大高度。 定义为:在取样长度l内,最大剖面的峰线与剖面谷底线的距离(图3),即为下式:
2、传统测量仪器
1) 光切显微镜
光切显微镜诞生于20世纪初,德国蔡司工厂率先生产。 它曾经被称为双管显微镜。
光切法(图4)的测量原理是用入射角为45°的光将狭缝像投影到被测面上,沿光反射方向用显微镜观察反射像,得到截面的显微形貌。 其表面粗糙度测量范围RZ为(1~100)㎛。
2)干涉显微镜
干涉显微镜(图5)的出现比双管显微镜稍晚。 最早产于前苏联,称为林尼克干涉显微镜。
采用双光束干涉原理,测量光束被被测面反射; 参考光束经平面镜反射,使干涉条纹与被测表面的显微成像叠加,测量干涉条纹的峰谷高度,从而得到零件的表面粗糙度。 其表面粗糙度测量范围RZ为(0.025~0.8)㎛。
3. 手写笔轮廓仪
stylus profiler出现在上个世纪中叶。 其工作原理是:固定在杠杆一侧的异常锋利的金刚石触针在轻微测量力的作用下与被测面接触,沿被测面匀速扫描,测杆上的微型位移传感器在杠杆的另一侧,采集触笔的水平和垂直位移。 粗糙度Ra、Rz、Ry由积分电路或计算机软件计算。
传统的测针式轮廓仪多采用电感式或压电式晶体微位移传感器。
上世纪末,英国FORM TALYSURF剖面仪(图6)采用激光偏振干涉仪作为微位移传感器。 垂直测量范围为4mm,分辨率为10nm。
4.现代测量仪器
1) 光探头轮廓仪
上述测针式轮廓仪的测针经常与被测表面发生摩擦,会造成磨损,操作时必须非常小心,以免划伤针尖。 目前,可进行非接触式测量的光探头式轮廓仪已经问世。 图7是基于自动聚焦原理的光学探头式轮廓仪*的示意图。 自动对焦方式源于CD(光盘存储)读写技术。 它利用自动聚焦的激光束跟踪轻微起伏的光盘表面,以非接触方式拾取压在CD光盘上的数字音乐信号。
该技术应用于显微轮廓测量,如图7所示:红外激光器1发出的光聚焦在被测物体的表面6上; 经表面反射后反方向返回,聚焦在探测器7上形成光斑。 聚焦检测器是一个二象限光电转换元件。 当光斑的位置如图所示处于b状态,即刚好聚焦在探测器平面上,光斑对称地位于探测器的两个象限之间。 此时,两个光敏象限可以提供相同的光电信号; 当系统在对边计进行扫描时,会遇到被测表面的微小凸起或凹陷,聚焦状态就会被破坏。 光点侧向落在探测器的一个象限上,形成一个模糊的发散半圆。 在a和c两种情况下,散焦信号产生控制电平信号,用于驱动动圈电机4(类似于扬声器振膜上的音圈)使扫描物镜跟随运动直到直到扫描物镜到达焦点位置。 其跟踪规律如图8所示的特性曲线。
因此表面粗糙度表,当自动聚焦光学探头扫描被测物体表面时,物镜始终跟随被测物体表面结构的轮廓,由此产生的垂直位移通过感应式位移传感器8并记录。
自动对焦法测量表面微结构尺寸有很多优点:
——由于是非接触式测量,不会对被测表面造成损伤,可以测量非常敏感或柔软的表面;
——测量速度快,可以扫描整个被测表面的三维形状,可以测量非常复杂的表面结构;
——加工过程中可实现在线测量。
- 该方法的水平分辨率由聚焦光斑的直径决定,一般为1μm左右。 与半径为4-8μm的普通机械探针轮廓仪的金刚石尖端半径相比,自动聚焦方法的光斑直径要小得多(图9),因此可以获得非常精细的表面结构特征。
2)白光干涉显微镜
干涉显微镜(图5),采用传统的目镜观察和人工测量的方法。 现代图像处理技术已经能够解决显微干涉图的机器识别问题,而白光扫描干涉测量技术的使用绝对是比较成熟的一种。
在使用白光照明的双光束干涉系统中,来自被测表面的测量光与来自参考镜的参考光形成的干涉条纹图像可以用周期为 λ0/ 的高斯曲线(图 10)表示2 由以下余弦函数描述:
在公式:
I0——干涉场背景光强度;
z - 测量
lc——光源的相干长度;
λ0——光源的中心波长。
在图 10 中表面粗糙度表,高斯函数的包络峰值出现在 z0 处。 由于被测面上两点相对于参考臂的光程差不同,且互有高差h,因此包络峰的位置会不同。 位置差对应于两个测量点之间的高度差。 白光扫描干涉仪工作时,通过线性扫描驱动装置改变参考镜的轴向位置,记录CCD面阵采集的每幅图像的每个像素在干涉场上的光强变化过程。扫描过程。 利用相干峰感知算法确定每个像素的包络峰位置,从而获得被测表面的三维形状。
图 11 显示了使用 Mirau 干涉* 的白光干涉仪的工作原理。 分束器3将来自白光照明光源1的光引入干涉系统。 参考镜6固定在圆柱形压电陶瓷5上,光束被分束器7分成两部分; 一部分反射到参考镜6作为参考光,另一部分透射到被测面8,返回后与参考光相遇并通过物镜4和9会聚在CCD面阵上光电装置。 计算机按预定程序控制,通过改变施加在压电陶瓷5上的电压,使参考镜6沿光轴等间隔移动,同时利用面阵CCD检测干涉场上每个像素点的光照强度。 对于每一个正弦函数,可以通过将像素上的光强度序列与数据进行拟合来获得。 通过比较CCD阵列各像素的正弦函数在干涉场上的相位,即可得到待测表面各点的高度。
白光干涉仪的优点是:
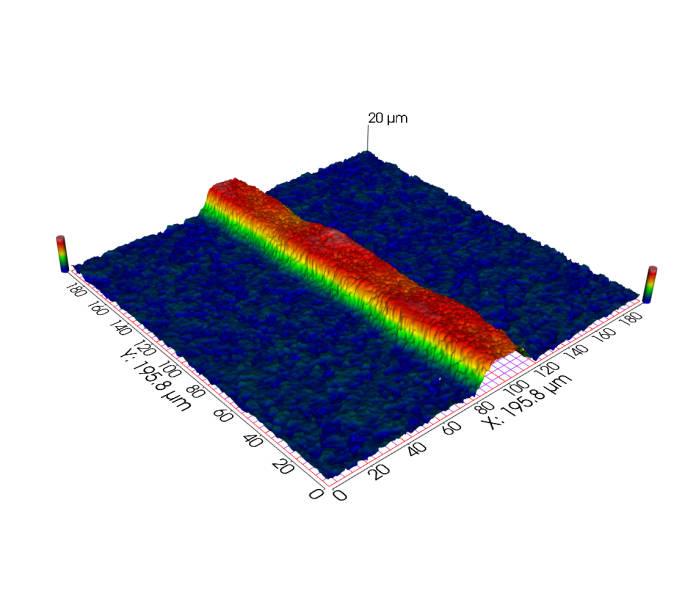
——利用CCD采集整个干涉场的光强分布,从而直接获得表面的微观三维形貌。 也称为 3D 表面轮廓仪。
——测量干涉场中各点的相位,与直流光强分布无关,为设计制造带来方便。
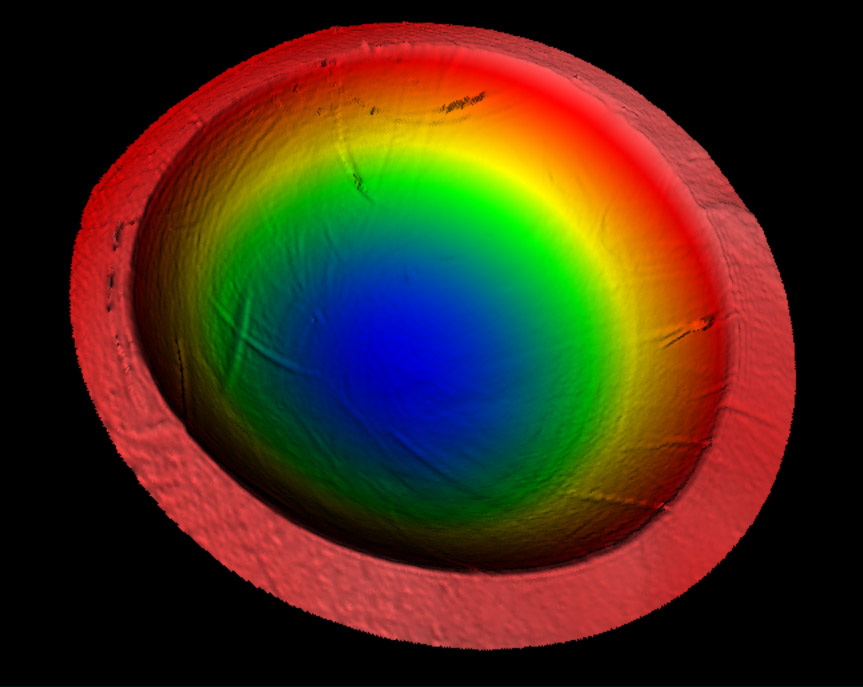
——高分辨率和测量精度,可多次重复测量,自动处理数据。 可用于平面、球面等复杂形状表面的测量。
注:本文第4章内容参考:王伯雄等。 微纳测量技术[M]. 北京:清华大学出版社,2006.8; 68~80。 111~115、159~160。
相关资讯
热销产品
同类文章排行
- 快手一元1000个赞秒到_卡盟平台_拼多多新人助力网站
- 和平小号网_拼多多助力网站在线刷免费_3元抖音小号批发网
- 刷网课代理_快手永久免费秒赞秒评软件_刷会员
- 一秒1w粉丝app_24小时全自助下单网站播放量_微博刷赞器
- qq会员秒拿5000成长值自助站_刷课网站_快手互赞软件免费
- 刷王者点卷的网站_qq互赞网站平台_拼多多免费助力网站
- qq-shuazan_抖音粉丝1元1000粉_快手粉丝-元100个不掉粉
- 免费领取500个微博粉丝_王者卡盟_快手粉丝-元100个不掉粉
- 拼多多砍价一毛十刀网站_猪猪网站_拼多多助力刷人软件
- 快手代刷网站_小柯秒赞网_qq刷钻
最新资讯文章
- 快手一元1000个赞秒到_卡盟平台_拼多多新人助力网站
- 和平小号网_拼多多助力网站在线刷免费_3元抖音小号批发网
- 刷网课代理_快手永久免费秒赞秒评软件_刷会员
- 一秒1w粉丝app_24小时全自助下单网站播放量_微博刷赞器
- qq会员秒拿5000成长值自助站_刷课网站_快手互赞软件免费
- 刷王者点卷的网站_qq互赞网站平台_拼多多免费助力网站
- qq-shuazan_抖音粉丝1元1000粉_快手粉丝-元100个不掉粉
- 免费领取500个微博粉丝_王者卡盟_快手粉丝-元100个不掉粉
- 拼多多砍价一毛十刀网站_猪猪网站_拼多多助力刷人软件
- 快手代刷网站_小柯秒赞网_qq刷钻
联系我们
- 友情链接
- 合作伙伴
Warning: mysqli::mysqli(): (HY000/1045): Access denied for user 'xydiaoke_lingk'@'localhost' (using password: YES) in /www/wwwroot/www.saoma.net.cn/wp-content/themes/ztnew/templates/term-links.php on line 56
Warning: mysqli::query(): Couldn't fetch mysqli in /www/wwwroot/www.saoma.net.cn/wp-content/themes/ztnew/templates/term-links.php on line 58
Warning: mysqli::close(): Couldn't fetch mysqli in /www/wwwroot/www.saoma.net.cn/wp-content/themes/ztnew/templates/term-links.php on line 69